Causal Navigation by Continuous time Neural Networks
arxiv
First written: Mar/18/2022, 16:17:21
Summary
- Causal modeling as a means to bridge the gap between direct, physical/mechanistic simulation and statistical learning
- Neural networks as an attractive means to parameterize causal models, with the idea of using continuous-time neural networks to capture causality
- This paper establishes certain types of continuous time neural networks represent causal models
- From a computing perspective, autonomous driving, scientific modeling, etc. all depend on predictable behavior from models; CT neural networks might be a critical part of AI workloads
Introduction
- Physical, mechanistic models are descriptive and encompass an arbitrary amount of detail, and are inherently predictive but intractable for complex phenomena
- Continuous time neural networks as a special class of promising methodologies; the time forward-backward mapping makes them causal, and impose inductive bias.
- This paper proves that continuous time networks are able to capture causality, in contrast to regular neural networks, by testing on control/navigation tasks.
- The key partly lies with attention: how a neural network maps particular input pixels onto navigation decisions
Problem
- Causal structures as directed acyclic graphs; see [[bayesian-network]]. The model implements a function for node/variable , that maps parent nodes () of and stochastic variables into the state . In other words, a function that takes into account past events to predict the current state: a [[markov-decision-process]].
- Typical reinforcement learning (e.g Q-learning) the agent learns to make decisions based on a time-dependent reward expectation: this differs from a causal model, and the decision process can be "shortcut" unpredictably so.
- Differential equations model time-evolution of variables with unique mappings (i.e. [[lipschitz-condition]]), which is causal (future events can be predicted by using past information)
- Continuous time neural networks parameterize differential equations ():
- A specific class of continuous time networks, liquid time-constant networks, expand in complexity:
where is thought of as a constant related to equilibrium, is an output control bias vector, and is the Hadamard product (elementwise operation). I don't have a great intuition for this expression, but to an extent it introduces "residual" elements that improve its expressitivity.
- Neural ODEs, by themselves, are not considered to be causal models, as they do not satisfy the causal mapping structure () in the definition earlier. In other words, they do not account for perturbations even if they are Lipschitz continuous.
- A specific case, as in the liquid time-constant networks, resemble a type of causal model called [[dynamic causal model]] with a bilinear Taylor approximation; DCMs are designed specifically to capture both internal and external causes on a dynamical system, which fulfills our condition from earlier.
- This paper provides three symbolic proofs: that LTC networks have unique solutions to initial value problems; as a neural network, can indeed be linked to the bilinear approximation to a DCM, which in turn allows parameters to be directly linked (causally) to predictions; forward- and backward-passes of the model give rise to causality.
Methodology
- Simulated navigation environments using Microsoft AirSim and Unreal Engine; render photorealistic environments and three tasks with different memory horizons
- Agents were implemented with NCP, other neural ODEs, and RNNs in a closed- (i.e. position information feedback) and open-loop (no position feedback to the agent)
- Finding was that neural ODE architectures and RNNs perform poorling in open-loop scenarios, although all performed quite well within closed-loop. The authors ascribe this difference as causal reasoning by inspecting salicency maps (gradients of pixels w.r.t. control inputs): only NCP showed attention to the target in why it made a particular control decision.
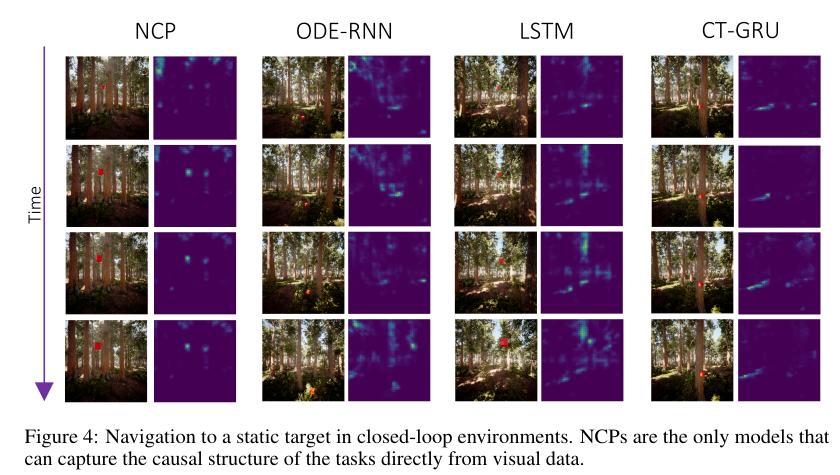
- The result looks nice, but I can't help but wonder why they didn't use the same environment to show the saliency maps...
- The interesting thing to look at as well is how each model learns: for example, LSTM seems incredibly affected by lighting
- The last two experiments described, hiking and weather patterns, test memory and visual performance respectively. For the latter in particular, memory (or causality) is a crucial component because the agent cannot rely solely on visual perception: what does this mean for object permanence?
Comments
- Would be interesting to see NCPs applied with inverse RL - can NCPs learn causality from expert trajectories?
Further reading
- Lechner et al., Neural circuit policies enabling auditable autonomy. Nature Machine Intelligence
- Hasani et al., Liquid time-constant networks. Proceedings of the AAAI Conference on Aritifcial Intelligence
- Fristo et al., Dynamic Causal Modelling. Neuroimage
Backlinks
dynamic causal model
A type of causal model; for the case of [[causal-navigation-by-continuous-time-neural-networks]], given a dynamical system governed by: